Adaptive Solver Accuracy
This example compares the accuracy and energy conservation of solvers that use changing time steps: the native AdaptiveBoris solver and the adaptive ODE solvers Tsit5 and Vern6.
Unlike the fixed-step tests in Solver Accuracy Analysis and Energy Conservation, these tests exercise the adaptive time-stepping machinery where dt changes during the simulation — e.g., the Boris velocity resync at dt transitions and the ODE error controllers.
Three cases are presented: 2. Magnetic Mirror — energy conservation with spatially varying |B|.
Constant E + B — accuracy convergence sweeping safety η (dt / T_gyro).
ExB Drift — long-term energy conservation.
using Printf
using TestParticle
import TestParticle as TP
using OrdinaryDiffEq
using StaticArrays
using LinearAlgebra: norm, ×, ⋅
using CairoMakie
const q = 1.0
const m = 1.0
const B₀ = 1.0
const Ω = q * B₀ / m
const T_gyro = 2π / Ω
function energy_error(sol, E_ref_func)
errs = Float64[]
for (t, u) in zip(sol.t, sol.u)
v_mag2 = u[4]^2 + u[5]^2 + u[6]^2
E_kin = 0.5 * m * v_mag2
E_ref = E_ref_func(t, u)
push!(
errs,
abs(E_kin - E_ref) / (abs(E_ref) + 1.0e-16),
)
end
return errs
end
function plot_table(results)
io = IOBuffer()
println(io, "| Solver | Max Rel. Error |")
println(io, "| :--- | :--- |")
for (name, err) in results
println(io, "| $name | $(@sprintf("%.1e", err)) |")
end
return Markdown.parse(String(take!(io)))
endplot_table (generic function with 1 method)Case 1: Magnetic Mirror — Energy Conservation
The magnetic mirror field is ideal for testing adaptive Boris: the spatially varying |B| causes genuine dt changes as the particle moves between weak-field and strong-field regions. Since E = 0, total kinetic energy should be exactly conserved.
The field is divergence-free in cylindrical symmetry:
function mirror_B(x)
α = 0.1
Bz = B₀ * (1 + α * x[3]^2)
Bx = -B₀ * α * x[1] * x[3]
By = -B₀ * α * x[2] * x[3]
return SA[Bx, By, Bz]
end
param1 = prepare(ZeroField(), mirror_B; q, m)
x0_1 = [0.1, 0.0, 0.0]
v0_1 = [0.5, 0.5, 1.0]
u0_1 = [x0_1..., v0_1...]
tspan1 = (0.0, 200.0)
E_init = 0.5 * m * norm(v0_1)^2
prob_tp1 = TraceProblem(u0_1, tspan1, param1)
prob_ode1 = ODEProblem(trace_normalized!, u0_1, tspan1, param1)
adaptive_solvers_1 = [
(
"AdaptiveBoris (η=1/16)",
AdaptiveBoris(; safety = 1 / 16),
),
(
"AdaptiveBoris (η=1/8)",
AdaptiveBoris(; safety = 1 / 8),
),
(
"AdaptiveBoris (η=1/4)",
AdaptiveBoris(; safety = 1 / 4),
),
]
ode_solvers_1 = [
("Tsit5 (default tol)", Tsit5(), Dict()),
(
"Tsit5 (tight tol)", Tsit5(),
Dict(:abstol => 1.0e-10, :reltol => 1.0e-10),
),
("Vern6 (default tol)", Vern6(), Dict()),
(
"Vern6 (tight tol)", Vern6(),
Dict(:abstol => 1.0e-10, :reltol => 1.0e-10),
),
]
f1 = Figure(; size = (1200, 500), fontsize = 20)
ax1a = Axis(
f1[1, 1];
yscale = log10,
xlabel = "Time [Gyroperiod]",
ylabel = "Rel. Energy Error",
title = "Magnetic Mirror: Energy Error",
yminorticksvisible = true,
yminorticks = IntervalsBetween(9),
)
ylims!(ax1a, 1.0e-16, 1.0)
ax1b = Axis(
f1[1, 2];
xlabel = "Time [Gyroperiod]",
ylabel = L"\Delta t / T_\mathrm{gyro}",
title = "AdaptiveBoris: Time Step History",
)
for (i, (name, alg)) in enumerate(adaptive_solvers_1)
sol = TP.solve(prob_tp1, alg).u[1]
errs = energy_error(sol, (t, u) -> E_init)
lines!(
ax1a, sol.t ./ T_gyro, errs;
label = name,
color = i, colormap = :tab10, colorrange = (1, 10),
)
dts = diff(sol.t)
lines!(
ax1b,
sol.t[1:(end - 1)] ./ T_gyro,
dts ./ T_gyro;
label = name,
color = i, colormap = :tab10, colorrange = (1, 10),
)
end
n_boris = length(adaptive_solvers_1)
for (i, (name, alg, kwargs)) in enumerate(ode_solvers_1)
sol = solve(prob_ode1, alg; dense = false, kwargs...)
errs = energy_error(sol, (t, u) -> E_init)
lines!(
ax1a, sol.t ./ T_gyro, errs;
label = name,
color = n_boris + i,
colormap = :tab10, colorrange = (1, 10),
)
dts = diff(sol.t)
lines!(
ax1b,
sol.t[1:(end - 1)] ./ T_gyro,
dts ./ T_gyro;
label = name,
color = n_boris + i, colormap = :tab10, colorrange = (1, 10),
)
end
f1[1, 3] = Legend(f1, ax1a; framevisible = false)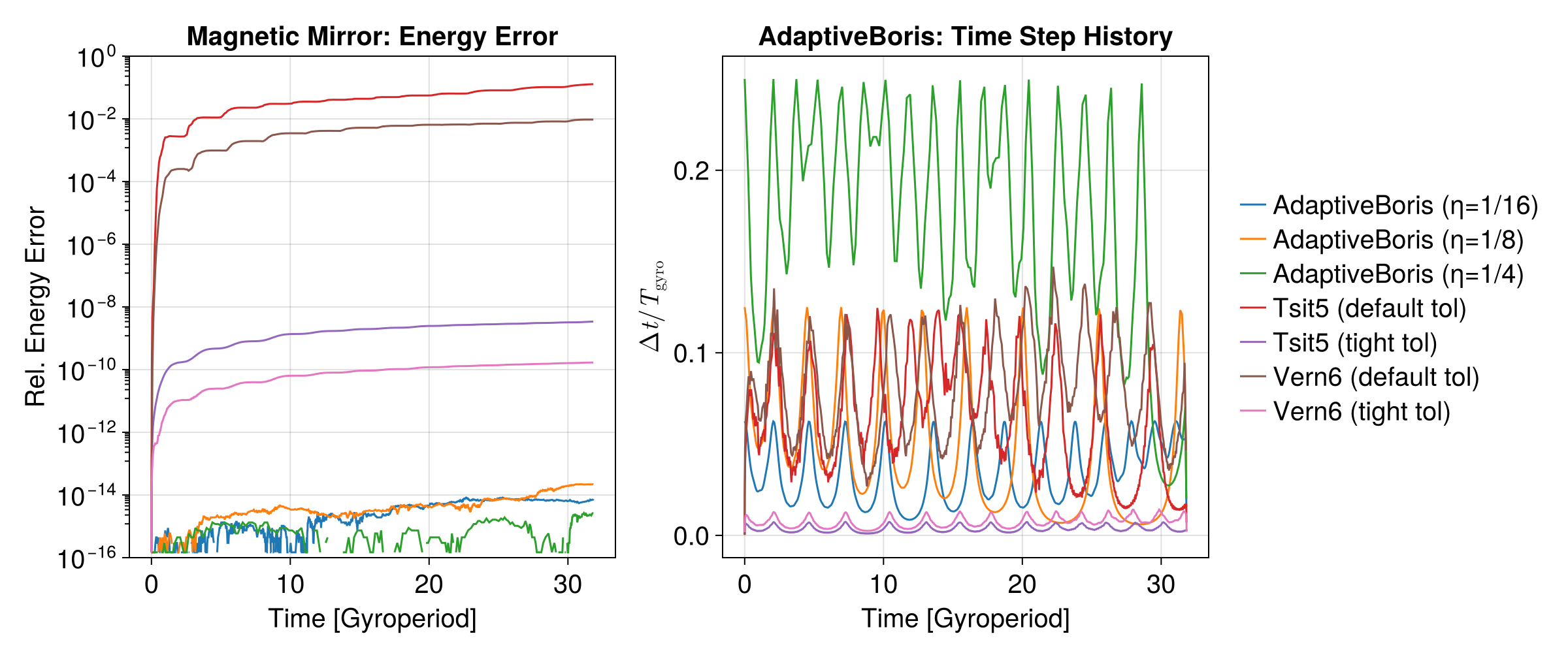
Summary
results1 = Tuple{String, Float64}[]
for (name, alg) in adaptive_solvers_1
sol = TP.solve(prob_tp1, alg).u[1]
errs = energy_error(sol, (t, u) -> E_init)
push!(results1, (name, maximum(errs)))
end
for (name, alg, kwargs) in ode_solvers_1
sol = solve(prob_ode1, alg; dense = false, kwargs...)
errs = energy_error(sol, (t, u) -> E_init)
push!(results1, (name, maximum(errs)))
end| Solver | Max Rel. Error |
|---|---|
| AdaptiveBoris (η=1/16) | 8.3e-15 |
| AdaptiveBoris (η=1/8) | 2.2e-14 |
| AdaptiveBoris (η=1/4) | 2.7e-15 |
| Tsit5 (default tol) | 1.3e-01 |
| Tsit5 (tight tol) | 3.4e-09 |
| Vern6 (default tol) | 9.5e-03 |
| Vern6 (tight tol) | 1.7e-10 |
Case 2: Constant E + B — Accuracy Convergence
With E = [0, 0.5, 0.1] and B = [0, 0, 1], an exact velocity solution exists (Section 6, Zenitani & Kato 2025). We sweep the safety parameter η (representing dt / T_gyro) for AdaptiveBoris and the tolerance for the ODE solvers, then plot maximum velocity error vs. number of time steps (computational cost).
B_func2(x, t) = SA[0.0, 0.0, 1.0]
E_func2(x, t) = SA[0.0, 0.5, 0.1]
const E_vec = SA[0.0, 0.5, 0.1]
const B_vec = SA[0.0, 0.0, 1.0]
function exact_velocity(t)
vD = (E_vec × B_vec) / (B₀^2)
E_par = (E_vec ⋅ (B_vec / B₀)) * (B_vec / B₀)
b̂ = B_vec / B₀
v_perp = -vD * cos(Ω * t) -
(vD × b̂) * sin(Ω * t) + vD
v_para = (q * E_par / m) * t
return v_perp + v_para
end
t_end2 = 6 * T_gyro
tspan2 = (0.0, t_end2)
u0_2 = [0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
param2 = prepare(E_func2, B_func2; q, m)
prob_tp2 = TraceProblem(u0_2, tspan2, param2)
prob_ode2 = ODEProblem(trace_normalized!, u0_2, tspan2, param2)
function max_velocity_error(sol)
max_err = 0.0
for (t, u) in zip(sol.t, sol.u)
v_num = SA[u[4], u[5], u[6]]
v_ana = exact_velocity(t)
max_err = max(max_err, norm(v_num - v_ana))
end
return max_err
end
safety_values = range(0.01, 0.2, length = 10)
tol_values = logrange(1.0e-12, 1.0e-2, length = 10)
boris_steps = Int[]
boris_errors = Float64[]
for s in safety_values
alg = AdaptiveBoris(; safety = s)
sol = TP.solve(prob_tp2, alg).u[1]
push!(boris_steps, length(sol.t))
push!(boris_errors, max_velocity_error(sol))
end
ode_results_2 = Dict{
String, Tuple{Vector{Int}, Vector{Float64}},
}()
for (name, alg) in [("Tsit5", Tsit5()), ("Vern6", Vern6())]
steps_vec = Int[]
err_vec = Float64[]
for tol in tol_values
sol = solve(
prob_ode2, alg;
abstol = tol, reltol = tol, dense = false,
)
push!(steps_vec, length(sol.t))
push!(err_vec, max_velocity_error(sol))
end
ode_results_2[name] = (steps_vec, err_vec)
endVisualization
f2 = Figure(; size = (700, 500), fontsize = 20)
ax2 = Axis(
f2[1, 1];
xscale = log10,
yscale = log10,
xlabel = "Number of Time Steps",
ylabel = "Max Velocity Error",
title = "Accuracy vs. Cost (Adaptive Solvers)",
xminorticksvisible = true,
yminorticksvisible = true,
xminorticks = IntervalsBetween(9),
yminorticks = IntervalsBetween(9),
)
scatterlines!(
ax2, boris_steps, boris_errors;
label = "AdaptiveBoris",
marker = :circle, linewidth = 2,
)
for (name, (steps_vec, err_vec)) in ode_results_2
scatterlines!(
ax2, steps_vec, err_vec;
label = "$name (adaptive)",
marker = :cross, linewidth = 2,
)
end
axislegend(ax2; position = :rt, framevisible = false)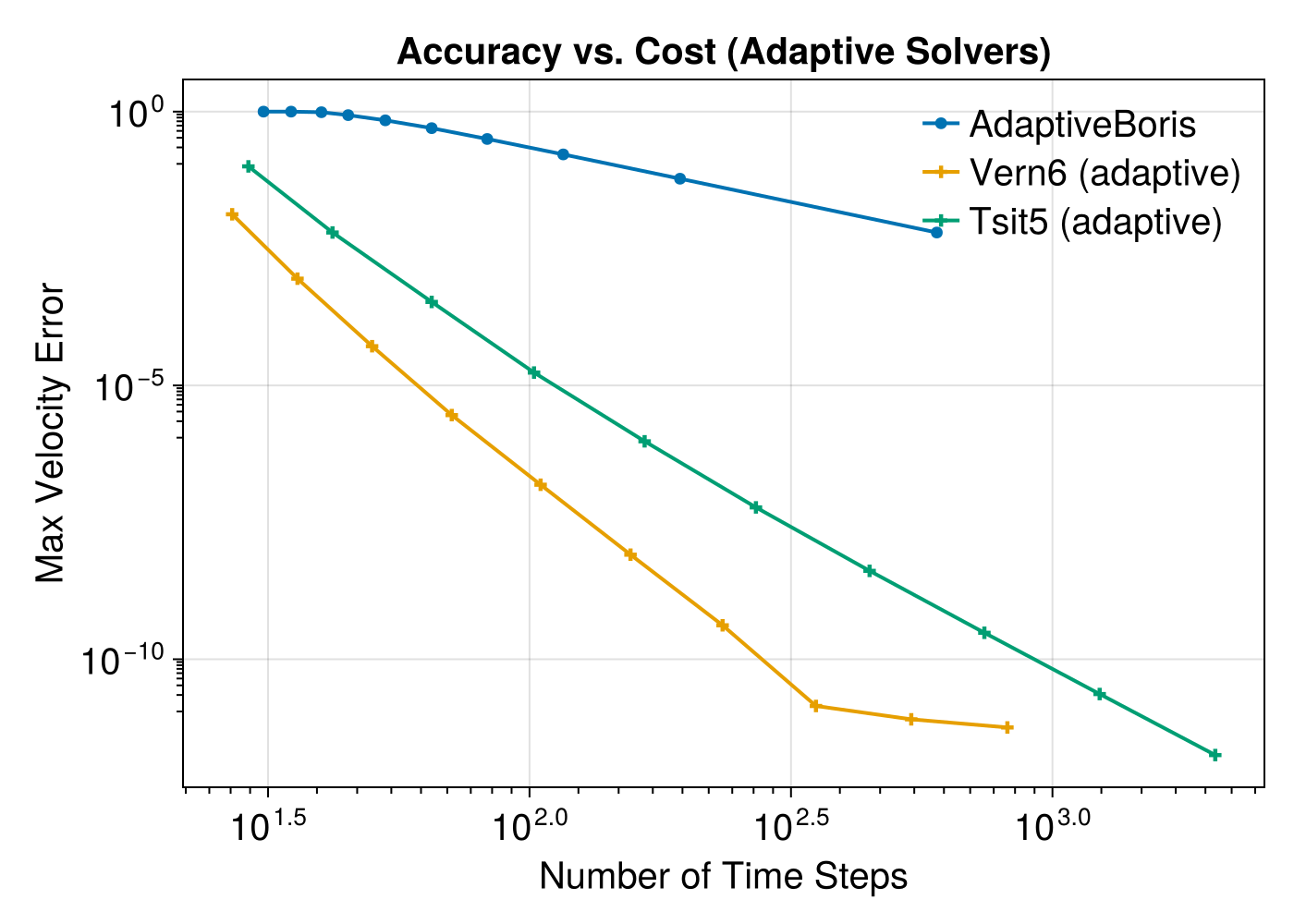
Case 3: ExB Drift — Long-term Energy Conservation
Using the same E and B as Case 2, the analytical kinetic energy gain is known exactly. We run for 200 gyroperiods to expose long-term drift.
const Ey_val = 0.5
const Ez_val = 0.1
function E_ref3(t, u)
vx = (Ey_val / B₀) * (1 - cos(Ω * t))
vy = (Ey_val / B₀) * sin(Ω * t)
vz = (q * Ez_val / m) * t
return 0.5 * m * (vx^2 + vy^2 + vz^2)
end
t_end3 = 200 * T_gyro
tspan3 = (0.0, t_end3)
param3 = prepare(E_func2, B_func2; q, m)
prob_tp3 = TraceProblem(u0_2, tspan3, param3)
prob_ode3 = ODEProblem(trace_normalized!, u0_2, tspan3, param3)
adaptive_solvers_3 = [
(
"AdaptiveBoris (η=0.1)",
AdaptiveBoris(; safety = 0.1),
),
(
"AdaptiveBoris (η=0.2)",
AdaptiveBoris(; safety = 0.2),
),
]
ode_solvers_3 = [
("Tsit5 (default tol)", Tsit5(), Dict()),
(
"Tsit5 (tight tol)", Tsit5(),
Dict(:abstol => 1.0e-10, :reltol => 1.0e-10),
),
("Vern6 (default tol)", Vern6(), Dict()),
(
"Vern6 (tight tol)", Vern6(),
Dict(:abstol => 1.0e-10, :reltol => 1.0e-10),
),
]
f3 = Figure(; size = (900, 500), fontsize = 20)
ax3 = Axis(
f3[1, 1];
yscale = log10,
xlabel = "Time [Gyroperiod]",
ylabel = L"""Rel. Energy Error
$|(E - E_\mathrm{ref})/E_\mathrm{ref}|$""",
title = "ExB Drift: Long-term Energy Error",
yminorticksvisible = true,
yminorticks = IntervalsBetween(9),
)
xlims!(ax3, 0.0, 200.0)
ylims!(ax3, 1.0e-16, 1.0)
results3 = Tuple{String, Float64}[]
for (i, (name, alg)) in enumerate(adaptive_solvers_3)
sol = TP.solve(prob_tp3, alg).u[1]
errs = energy_error(sol, E_ref3)
lines!(
ax3, sol.t ./ T_gyro, errs;
label = name,
color = i, colormap = :tab10, colorrange = (1, 10),
)
push!(results3, (name, maximum(errs)))
end
n_ab = length(adaptive_solvers_3)
for (i, (name, alg, kwargs)) in enumerate(ode_solvers_3)
sol = solve(prob_ode3, alg; dense = false, kwargs...)
errs = energy_error(sol, E_ref3)
lines!(
ax3, sol.t ./ T_gyro, errs;
label = name,
color = n_ab + i,
colormap = :tab10, colorrange = (1, 10),
)
push!(results3, (name, maximum(errs)))
end
f3[1, 2] = Legend(f3, ax3; framevisible = false)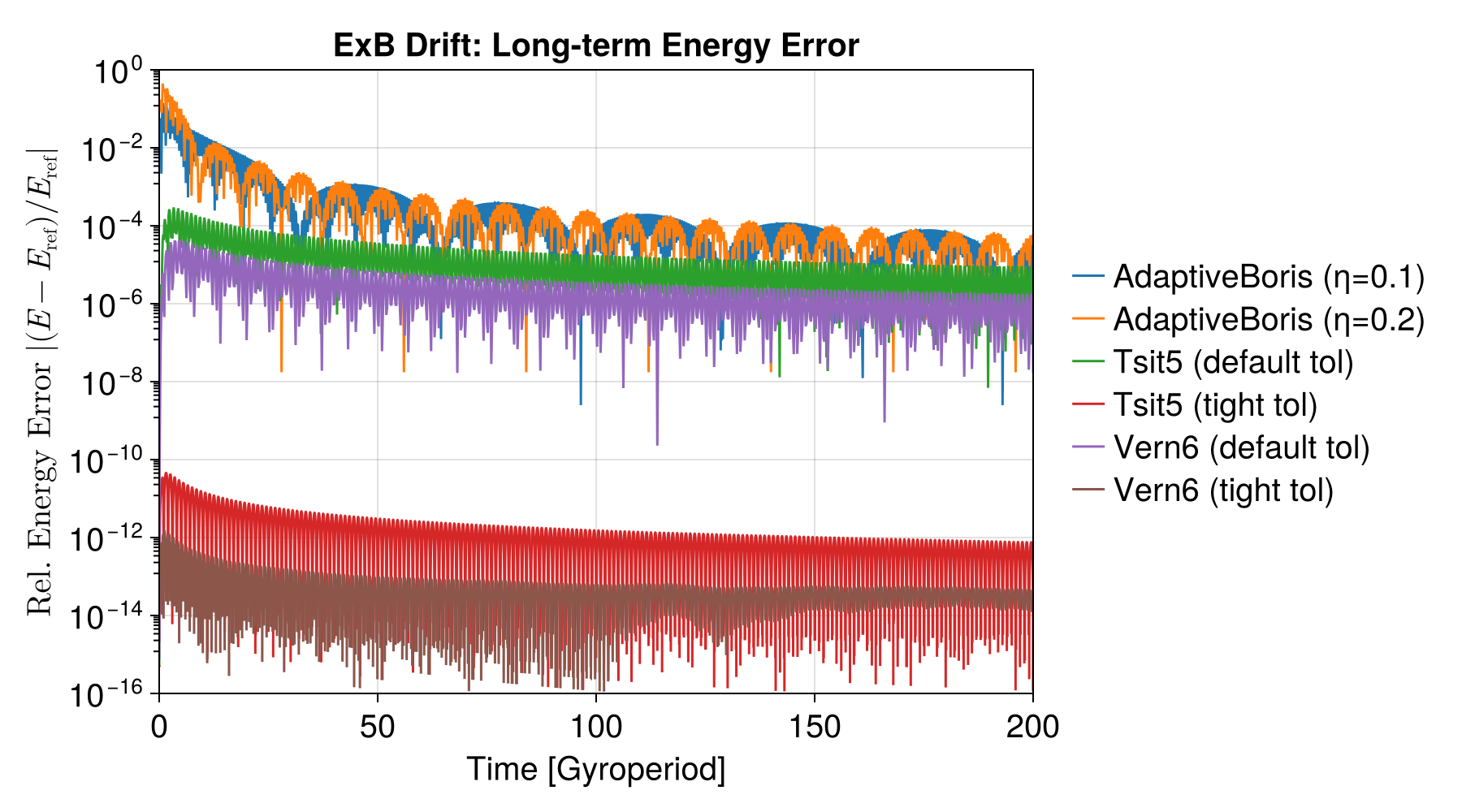
Summary
| Solver | Max Rel. Error |
|---|---|
| AdaptiveBoris (η=0.1) | 1.4e-01 |
| AdaptiveBoris (η=0.2) | 4.4e-01 |
| Tsit5 (default tol) | 3.0e-04 |
| Tsit5 (tight tol) | 4.5e-11 |
| Vern6 (default tol) | 4.2e-05 |
| Vern6 (tight tol) | 1.5e-12 |