Dimensionless Units and Normalization
This example shows how to trace charged particles in dimensionless units.
Tracing in dimensionless units is beneficial for many scenarios. For example, MHD simulations do not have intrinsic scales. Therefore, we can do dimensionless particle tracing in MHD fields, and then convert to any scale we would like.
It also combines one type of normalization using a reference velocity U₀, a reference magnetic field B₀, and a reference time 1/Ω, where Ω is the gyrofrequency. This indicates that in the dimensionless units, a proton with initial perpendicular velocity 1 under magnetic field magnitude 1 will possess a gyro-radius of 1. In the dimensionless spatial coordinates, we can zoom in/out the EM field to control the number of discrete points encountered in a gyroperiod. For example, if dx=dy=dz=1, it means that a particle with perpendicular velocity 1 will "see" one discrete point along a certain direction oriented from the gyro-center within the gyro-radius; if dx=dy=dz=0.5, then the particle will "see" two discrete points. MHD models, for instance, are dimensionless by nature. There will be customized (dimensionless) units for (x,y,z,E,B) that we need to convert for computation. If we simulate a turbulence field with MHD, we want to include more discrete points within a gyro-radius for the effect of small scale perturbations to take place. (Otherwise within one gyro-period all you will see is a nice-looking helix!) However, we cannot simply shrink the spatial coordinates as we wish, otherwise we will quickly encounter the boundary of our simulation.
For the cosmic-ray-specific form of this normalization — the pitch angle, energy-conserving tracing, and the
Normalization
After normalization,
The Lorentz equation in SI units is written as
It can be normalized to
with the following transformation
where all the coefficients with subscript 0 are expressed in SI units. All the variables with a prime are written in the dimensionless units.
Basic Tracing
Now let's demonstrate this with trace_normalized!.
using TestParticle, OrdinaryDiffEq, StaticArrays
using TestParticle: qᵢ, mᵢ, c
using CairoMakie
# Number of cells for the field along each dimension
nx, ny, nz = 4, 6, 8
# Unit conversion factors between SI and dimensionless units
B₀ = 10.0e-9 # [T]
Ω = abs(qᵢ) * B₀ / mᵢ # [1/s]
t₀ = 1 / Ω # [s]
U₀ = 1.0 # [m/s]
l₀ = U₀ * t₀ # [m]
E₀ = U₀ * B₀ # [V/m]
# All quantities are in dimensionless units
x = range(-10, 10, length = nx) # [l₀]
y = range(-10, 10, length = ny) # [l₀]
z = range(-10, 10, length = nz) # [l₀]
B = fill(0.0, 3, nx, ny, nz) # [B₀]
B[3, :, :, :] .= 1.0
E = fill(0.0, 3, nx, ny, nz) # [E₀]
param = prepare(x, y, z, E, B; m = 1, q = 1)
# Initial condition
stateinit = let
x0 = [0.0, 0.0, 0.0] # initial position [l₀]
u0 = [4.0, 0.0, 0.0] # initial velocity [v₀]
[x0..., u0...]
end
# Time span
tspan = (0.0, π) # half gyroperiod
prob = ODEProblem(trace_normalized!, stateinit, tspan, param)
sol = solve(prob, Vern9())
### Visualization
f = Figure(fontsize = 18)
ax = Axis(
f[1, 1],
title = "Proton trajectory",
xlabel = "X",
ylabel = "Y",
limits = (-4.1, 4.1, -8.1, 0.1),
aspect = DataAspect()
)
lines!(ax, sol, idxs = (1, 2))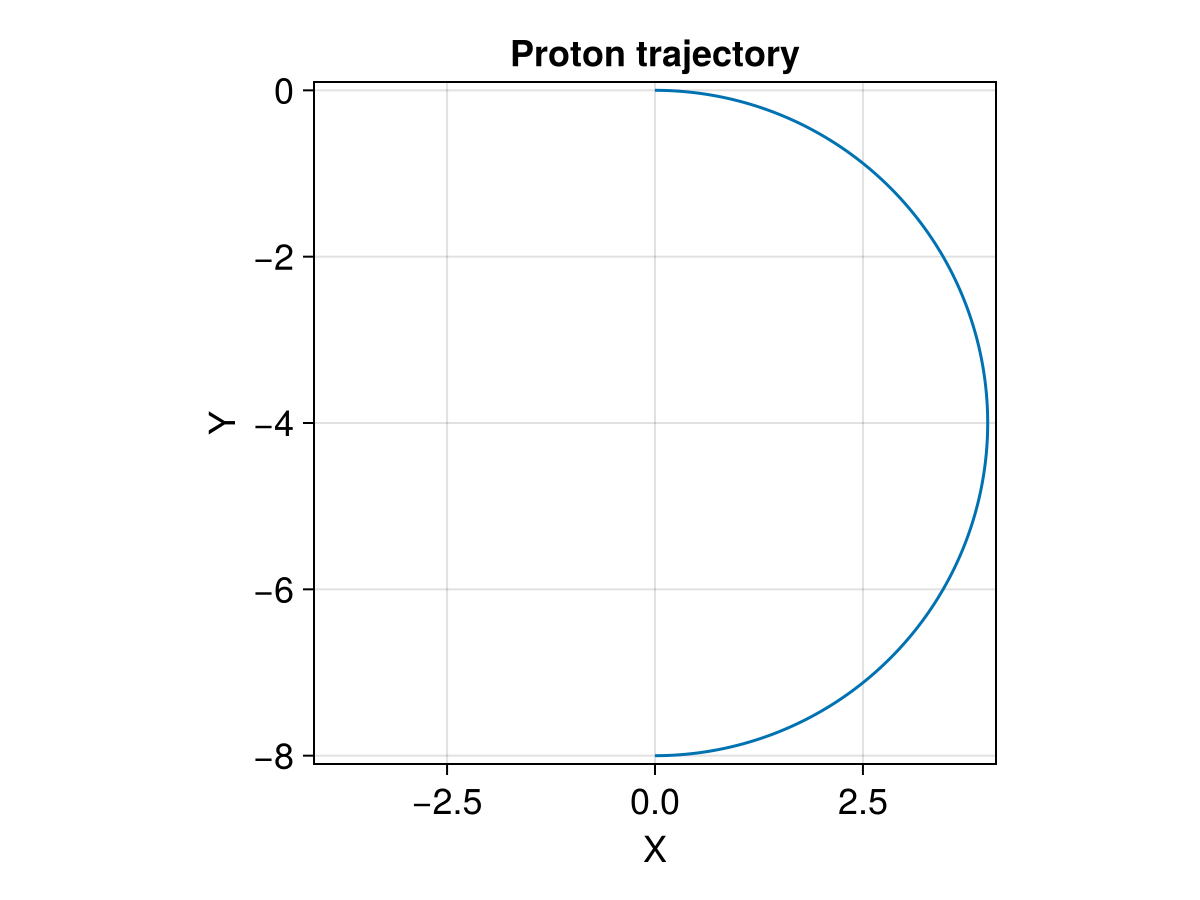
Relativistic Tracing
In the relativistic case,
Velocity is normalized by speed of light c,
; Magnetic field is normalized by the characteristic magnetic field,
; Electric field is normalized by
, ; Location is normalized by the
, where , and Time is normalized by
, .
In the small velocity scenario, it should behave similar to the non-relativistic case:
param = prepare(xu -> SA[0.0, 0.0, 0.0], xu -> SA[0.0, 0.0, 1.0]; m = 1, q = 1)
tspan = (0.0, π) # half period
stateinit = [0.0, 0.0, 0.0, 0.01, 0.0, 0.0]
prob = ODEProblem(trace_relativistic_normalized!, stateinit, tspan, param)
sol = solve(prob, Vern9())
### Visualization
f = Figure(fontsize = 18)
ax = Axis(
f[1, 1],
title = "Relativistic particle trajectory",
xlabel = "X",
ylabel = "Y",
##limits = (-0.6, 0.6, -1.1, 0.1),
aspect = DataAspect()
)
lines!(ax, sol, idxs = (1, 2))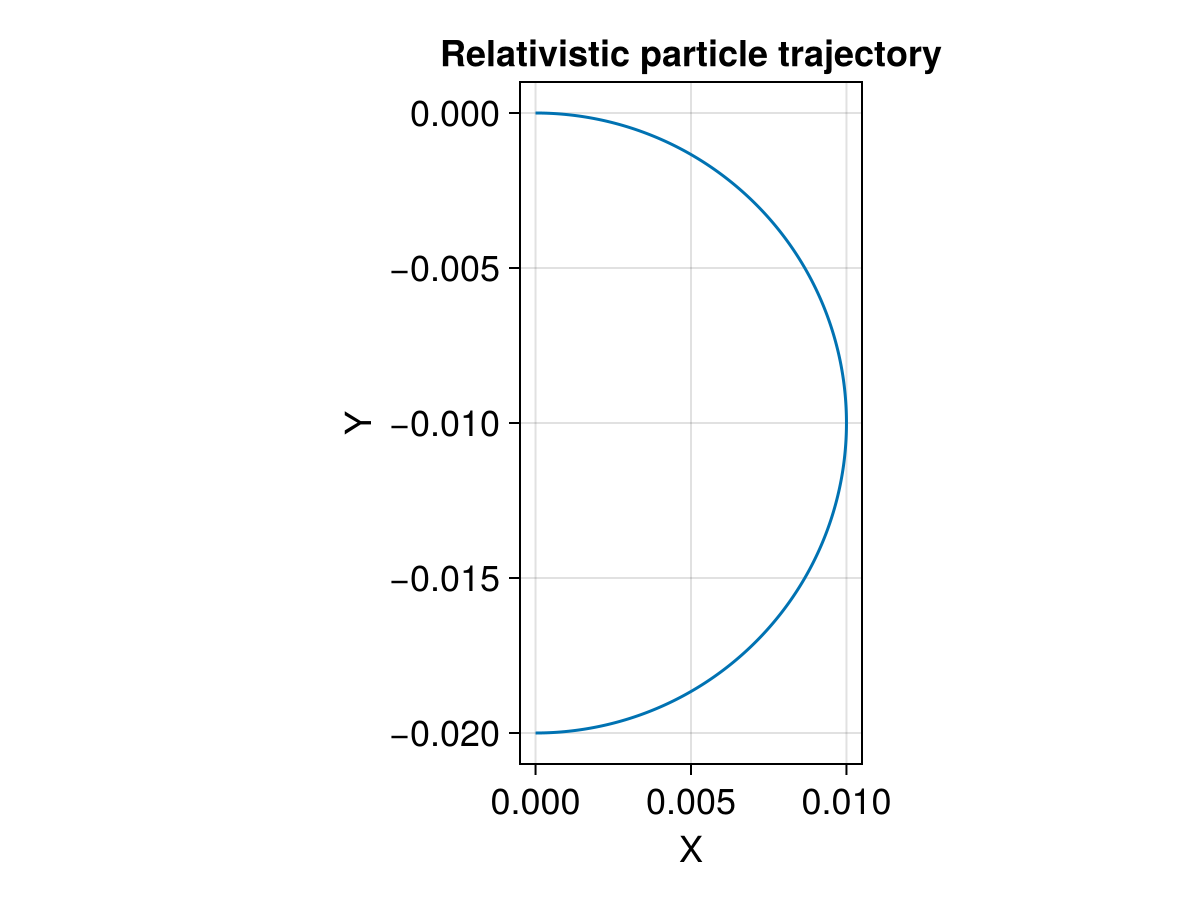
In the large velocity scenario, relativistic effect takes place:
param = prepare(xu -> SA[0.0, 0.0, 0.0], xu -> SA[0.0, 0.0, 1.0]; m = 1, q = 1)
tspan = (0.0, π) # half period
stateinit = [0.0, 0.0, 0.0, 0.9, 0.0, 0.0]
prob = ODEProblem(trace_relativistic_normalized!, stateinit, tspan, param)
sol = solve(prob, Vern9())
### Visualization
f = Figure(fontsize = 18)
ax = Axis(
f[1, 1],
title = "Relativistic particle trajectory",
xlabel = "X",
ylabel = "Y",
aspect = DataAspect()
)
lines!(ax, sol, idxs = (1, 2))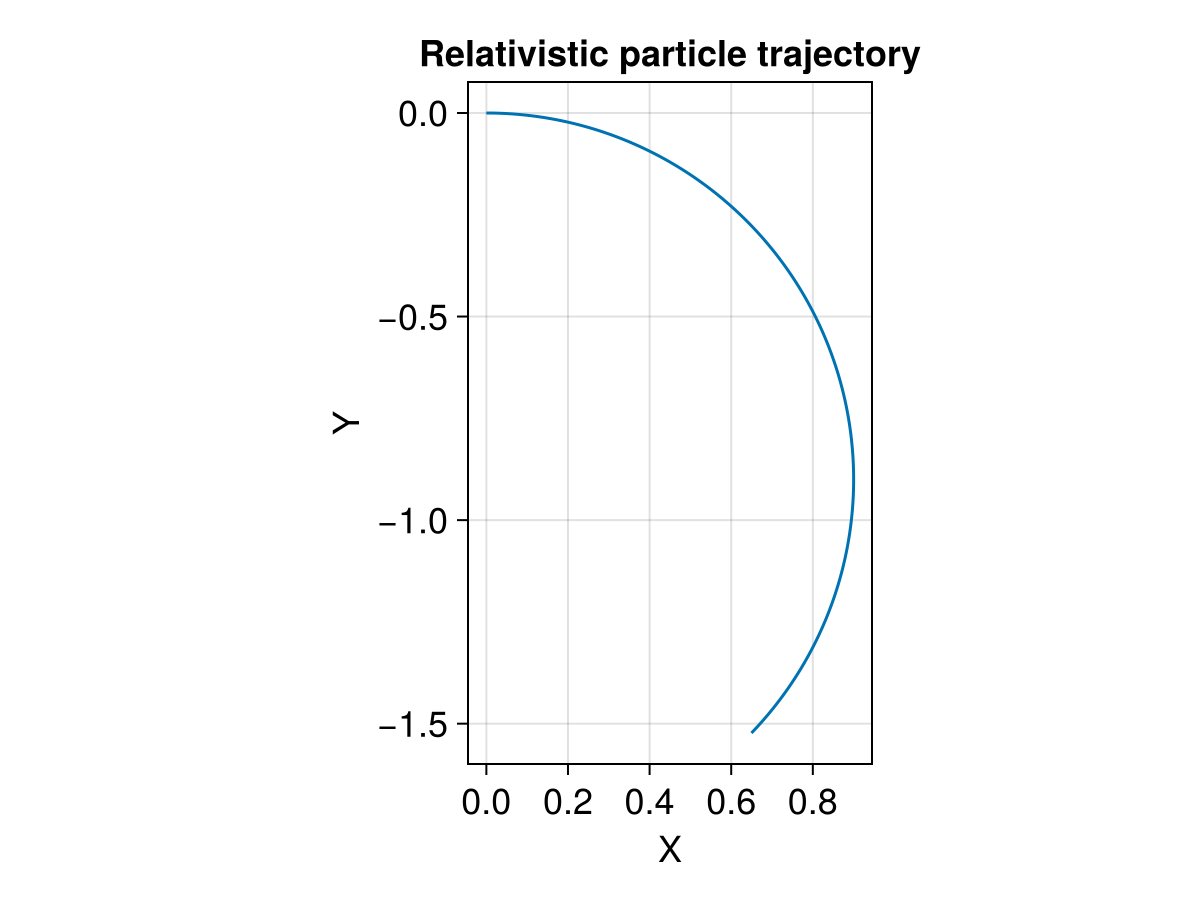
Dimensionless and Dimensional Tracing
We first solve the Lorentz equation in SI units, and then convert the quantities to normalized units and solve it again in dimensionless units.
# Unit conversion factors between SI and dimensionless units
B_dim = 1.0e-8 # [T]
U_dim = c # [m/s]
E_dim = U_dim * B_dim # [V/m]
Ω_dim = abs(qᵢ) * B_dim / mᵢ # [1/s]
t_dim = 1 / Ω_dim # [s]
l_dim = U_dim * t_dim # [m]
# Electric field magnitude in SI units
Emag_dim = 1.0e-8 # [V/m]
### Solving in SI units
B_field(x) = SA[0, 0, B_dim]
E_field(x) = SA[Emag_dim, 0.0, 0.0]
# Initial conditions
x0_dim = [0.0, 0.0, 0.0] # [m]
v0_dim = [0.0, 0.01c, 0.0] # [m/s]
stateinit1 = [x0_dim..., v0_dim...]
tspan1 = (0, 2π * t_dim) # [s]
param1 = prepare(E_field, B_field, species = Proton)
prob1 = ODEProblem(trace!, stateinit1, tspan1, param1)
sol1 = solve(prob1, Vern9(); reltol = 1.0e-4, abstol = 1.0e-6)
### Solving in dimensionless units
B_normalize(x) = SA[0, 0, B_dim / B_dim]
E_normalize(x) = SA[Emag_dim / E_dim, 0.0, 0.0]
# For full EM problems, the normalization of E and B should be done separately.
param2 = prepare(E_normalize, B_normalize; m = 1, q = 1)
# Scale initial conditions by the conversion factors
x0_norm = x0_dim ./ l_dim
v0_norm = v0_dim ./ U_dim
tspan2 = (0, 2π)
stateinit2 = [x0_norm..., v0_norm...]
prob2 = ODEProblem(trace_normalized!, stateinit2, tspan2, param2)
sol2 = solve(prob2, Vern9(); reltol = 1.0e-4, abstol = 1.0e-6)
### Visualization
f = Figure(fontsize = 18)
ax = Axis(
f[1, 1],
xlabel = "x [km]",
ylabel = "y [km]",
aspect = DataAspect()
)
lines!(ax, sol1, idxs = (1, 2))
# Interpolate dimensionless solutions and map back to SI units
xp, yp = let trange = range(tspan2..., length = 40)
sol2.(trange, idxs = 1) .* l_dim, sol2.(trange, idxs = 2) .* l_dim
end
lines!(ax, xp, yp, linestyle = :dashdot, linewidth = 5, color = Makie.wong_colors()[2])
invL = inv(1.0e3)
scale!(ax.scene, invL, invL)
We see that the results are almost identical, with only floating point numerical errors. Tracing in dimensionless units usually allows larger timesteps, which leads to faster computation.
Tracing with Periodic Boundary
This example shows how to trace charged particles in dimensionless units and EM fields with periodic boundaries in a 2D spatial domain.
Now let's demonstrate this with trace_normalized!.
# Number of cells for the field along each dimension
nx, ny = 4, 6
# Unit conversion factors between SI and dimensionless units
B₀ = 10.0e-9 # [T]
Ω = abs(qᵢ) * B₀ / mᵢ # [1/s]
t₀ = 1 / Ω # [s]
U₀ = 1.0 # [m/s]
l₀ = U₀ * t₀ # [m]
E₀ = U₀ * B₀ # [V/m]
x = range(-10, 10, length = nx) # [l₀]
y = range(-10, 10, length = ny) # [l₀]
B = fill(0.0, 3, nx, ny) # [B₀]
B[3, :, :] .= 1.0
E_zero(x) = SA[0.0, 0.0, 0.0] # [E₀]
# If bc == 1, we set a NaN value outside the domain (default);
# If bc == 2, we set periodic boundary conditions.
param = prepare(x, y, E_zero, B; m = 1, q = 1, bc = WrapExtrap());Note that we set a radius of 10, so the trajectory extent from -20 to 0 in y, which is beyond the original y range.
# Initial conditions
stateinit = let
x0 = [0.0, 0.0, 0.0] # initial position [l₀]
u0 = [10.0, 0.0, 0.0] # initial velocity [v₀]
[x0..., u0...]
end
# Time span
tspan = (0.0, 1.5π) # 3/4 gyroperiod
prob = ODEProblem(trace_normalized!, stateinit, tspan, param)
sol = solve(prob, Vern9());Visualization
f = Figure(fontsize = 18)
ax = Axis(
f[1, 1],
title = "Proton trajectory",
xlabel = "X",
ylabel = "Y",
limits = (-10.1, 10.1, -20.1, 0.1),
aspect = DataAspect()
)
lines!(ax, sol, idxs = (1, 2))