Performance Benchmark
This example compares the performance of the native Boris method against various ODE solvers from OrdinaryDiffEq.jl. We use Chairmarks.jl for benchmarking.
using Chairmarks
using TestParticle
using OrdinaryDiffEq, OrdinaryDiffEqRosenbrock, OrdinaryDiffEqSDIRK
using StaticArrays
using CairoMakie
using Statistics
import TestParticle as TPSimulation Setup
We use a simple setup: an electron in a uniform magnetic field.
const Bmag = 0.01
uniform_B(x) = SA[0.0, 0.0, Bmag]
zero_E = ZeroField()
x0 = SA[0.0, 0.0, 0.0]
v0 = SA[0.0, 1.0e5, 0.0]
stateinit = SA[x0..., v0...]
# (q2m, m, E, B, F)
param = prepare(zero_E, uniform_B, species = Electron)
q2m = TP.get_q2m(param)
# Reference parameters
const tperiod = 2π / (abs(q2m) * Bmag)
tspan = (0.0, 400 * tperiod)
dt = tperiod / 12
prob_boris = TraceProblem(stateinit, tspan, param)
# ODE solvers from DifferentialEquations.jl are optimized for StaticArrays (SVector)
prob_ode = ODEProblem(trace, stateinit, tspan, param)ODEProblem with uType StaticArraysCore.SVector{6, Float64} and tType Float64. In-place: false
Non-trivial mass matrix: false
timespan: (0.0, 1.428954701151284e-6)
u0: 6-element StaticArraysCore.SVector{6, Float64} with indices SOneTo(6):
0.0
0.0
0.0
0.0
100000.0
0.0Benchmark
We benchmark the following solvers:
solvers = [
("Boris (n=1, N=2)", "standard Boris (n=1, N=2)", :Boris, () -> TP.solve(prob_boris, Boris(); dt)),
("Boris (n=2, N=2)", "2-cycled (n=2, N=2)", :Boris, () -> TP.solve(prob_boris, MultistepBoris2(; n = 2); dt)),
("Boris (n=4, N=2)", "4-cycled (n=4, N=2)", :Boris, () -> TP.solve(prob_boris, MultistepBoris2(; n = 4); dt)),
("Boris (n=1, N=6)", "6-th order Boris (n=1, N=6)", :Boris, () -> TP.solve(prob_boris, MultistepBoris6(; n = 1); dt)),
("Boris (n=2, N=6)", "Hyper Boris (n=2, N=6)", :Boris, () -> TP.solve(prob_boris, MultistepBoris6(; n = 2); dt)),
("Boris (n=4, N=6)", "Hyper Boris (n=4, N=6)", :Boris, () -> TP.solve(prob_boris, MultistepBoris6(; n = 4); dt)),
("Tsit5 (fixed)", "`OrdinaryDiffEq` Tsit5 with fixed step", :Fixed, () -> solve(prob_ode, Tsit5(); adaptive = false, dt, dense = false)),
("Tsit5 (adaptive)", "`OrdinaryDiffEq` Tsit5 with adaptive step", :Adaptive, () -> solve(prob_ode, Tsit5(); saveat = dt)),
("Vern7 (fixed)", "`OrdinaryDiffEq` Vern7 with fixed step", :Fixed, () -> solve(prob_ode, Vern7(); adaptive = false, dt, dense = false)),
("Vern7 (adaptive)", "`OrdinaryDiffEq` Vern7 with adaptive step", :Adaptive, () -> solve(prob_ode, Vern7(); saveat = dt)),
("Vern9 (fixed)", "`OrdinaryDiffEq` Vern9 with fixed step", :Fixed, () -> solve(prob_ode, Vern9(); adaptive = false, dt, dense = false)),
("Vern9 (adaptive)", "`OrdinaryDiffEq` Vern9 with adaptive step", :Adaptive, () -> solve(prob_ode, Vern9(); saveat = dt)),
("AutoVern7 (adaptive)", "`OrdinaryDiffEq` AutoVern7 with adaptive step", :Adaptive, () -> solve(prob_ode, AutoVern7(Rodas5()); saveat = dt)),
("AutoVern9 (adaptive)", "`OrdinaryDiffEq` AutoVern9 with adaptive step", :Adaptive, () -> solve(prob_ode, AutoVern9(Rodas5()); saveat = dt)),
("ImplicitMidpoint", "`OrdinaryDiffEq` ImplicitMidpoint with fixed step", :Fixed, () -> solve(prob_ode, ImplicitMidpoint(); adaptive = false, dt, dense = false)),
]| Solver | Description |
|---|---|
| Boris (n=1, N=2) | standard Boris (n=1, N=2) |
| Boris (n=2, N=2) | 2-cycled (n=2, N=2) |
| Boris (n=4, N=2) | 4-cycled (n=4, N=2) |
| Boris (n=1, N=6) | 6-th order Boris (n=1, N=6) |
| Boris (n=2, N=6) | Hyper Boris (n=2, N=6) |
| Boris (n=4, N=6) | Hyper Boris (n=4, N=6) |
| Tsit5 (fixed) | OrdinaryDiffEq Tsit5 with fixed step |
| Tsit5 (adaptive) | OrdinaryDiffEq Tsit5 with adaptive step |
| Vern7 (fixed) | OrdinaryDiffEq Vern7 with fixed step |
| Vern7 (adaptive) | OrdinaryDiffEq Vern7 with adaptive step |
| Vern9 (fixed) | OrdinaryDiffEq Vern9 with fixed step |
| Vern9 (adaptive) | OrdinaryDiffEq Vern9 with adaptive step |
| AutoVern7 (adaptive) | OrdinaryDiffEq AutoVern7 with adaptive step |
| AutoVern9 (adaptive) | OrdinaryDiffEq AutoVern9 with adaptive step |
| ImplicitMidpoint | OrdinaryDiffEq ImplicitMidpoint with fixed step |
To simulate realistic applications, we save the solution at fixed intervals for all solvers. For adaptive solvers, the default relative tolerance is 1e-3 and absolute tolerance is 1e-6.
"""
Helper functions to extract the median execution time and memory allocation.
"""
function get_median_time_memory(b)
mb = median(b)
return mb.time, mb.bytes
end
n_solvers = length(solvers)
results_time = Vector{Float64}(undef, n_solvers)
results_mem = Vector{Float64}(undef, n_solvers)
names = Vector{String}(undef, n_solvers)
groups = Vector{Symbol}(undef, n_solvers)
for (i, (name, desc, group, func)) in enumerate(solvers)
println("Benchmarking $name...")
b = @be $func() seconds = 1
mt, mm = get_median_time_memory(b)
results_time[i] = mt
results_mem[i] = mm
names[i] = name
groups[i] = group
endBenchmarking Boris (n=1, N=2)...
Benchmarking Boris (n=2, N=2)...
Benchmarking Boris (n=4, N=2)...
Benchmarking Boris (n=1, N=6)...
Benchmarking Boris (n=2, N=6)...
Benchmarking Boris (n=4, N=6)...
Benchmarking Tsit5 (fixed)...
Benchmarking Tsit5 (adaptive)...
Benchmarking Vern7 (fixed)...
Benchmarking Vern7 (adaptive)...
Benchmarking Vern9 (fixed)...
Benchmarking Vern9 (adaptive)...
Benchmarking AutoVern7 (adaptive)...
Benchmarking AutoVern9 (adaptive)...
Benchmarking ImplicitMidpoint...Normalize results
min_time = minimum(results_time)
min_mem = minimum(results_mem)
results_time_norm = results_time ./ min_time
results_mem_norm = results_mem ./ min_mem;Detailed Performance Comparison
First, we present a detailed comparison of elapsed time and memory allocations for the solvers as a bar plot.
colors = Makie.wong_colors()
f = Figure(size = (1200, 800), fontsize = 24)
y_positions = 1:n_solvers
ax_time = Axis(
f[1, 1],
xlabel = "Elapsed Time (s)",
ylabel = "Solvers",
yticks = (y_positions, names),
xscale = log10,
xgridstyle = :dash,
ygridstyle = :dash,
xminorticksvisible = true,
xminorticks = IntervalsBetween(9)
)
ax_mem = Axis(
f[1, 1],
xaxisposition = :top,
xlabel = "Memory Allocations (kB)",
xscale = log10,
xgridvisible = false,
ygridvisible = false,
yticksvisible = false,
yticklabelsvisible = false,
xminorticksvisible = true,
xminorticks = IntervalsBetween(9)
)
linkyaxes!(ax_time, ax_mem)
bar_width = 0.35
color_time = colors[1]
color_mem = colors[2]
barplot!(
ax_time, y_positions .- bar_width / 2, results_time;
direction = :x, width = bar_width, color = color_time
)
# Avoid 0 for log plot
results_mem_kb = results_mem ./ 1024
safe_results_mem = max.(results_mem_kb, 1.0e-3)
barplot!(
ax_mem, y_positions .+ bar_width / 2, safe_results_mem;
direction = :x, width = bar_width, color = color_mem
)
elements = [PolyElement(polycolor = color_time), PolyElement(polycolor = color_mem)]
labels = ["Elapsed Time", "Memory Allocations"]
Legend(
f[1, 1], elements, labels, "Metrics";
framevisible = false, halign = :right, valign = :bottom,
tellwidth = false, tellheight = false
)
Solver Efficiency
Next, we evaluate the solver efficiency by plotting relative time versus relative memory.
f2 = Figure(size = (1200, 800), fontsize = 24)
ax = Axis(
f2[1, 1],
title = "Solver Efficiency (Time vs. Memory)",
xlabel = "Relative Time (1.0 = Fastest)",
ylabel = "Relative Memory (1.0 = Lowest)",
xgridstyle = :dash,
ygridstyle = :dash,
xscale = log10,
yscale = log10,
xminorticksvisible = true,
yminorticksvisible = true,
xminorticks = IntervalsBetween(9),
yminorticks = IntervalsBetween(9)
)Makie.Axis with 0 plots:Defined groups and colors
unique_groups = unique(groups)
group_colors = Dict(g => colors[i] for (i, g) in enumerate(unique_groups))Dict{Symbol, ColorTypes.RGBA{Float32}} with 3 entries:
:Boris => RGBA(0.0, 0.447059, 0.698039, 1.0)
:Adaptive => RGBA(0.0, 0.619608, 0.45098, 1.0)
:Fixed => RGBA(0.901961, 0.623529, 0.0, 1.0)Marker palette for the individual solvers in each group
marker_palette = [:circle, :rect, :utriangle, :dtriangle, :diamond, :pentagon, :hexagon, :star5, :xcross, :cross]
legend_elements = Vector{Vector{MarkerElement}}()
legend_labels = Vector{Vector{String}}()
legend_titles = String[]
for g in unique_groups
idxs = findall(==(g), groups)
group_elements = MarkerElement[]
group_labels = String[]
for (i, idx) in enumerate(idxs)
marker_shape = marker_palette[mod1(i, length(marker_palette))]
push!(
group_elements,
MarkerElement(
color = (group_colors[g], 0.7), marker = marker_shape,
markersize = 15, strokecolor = :black, strokewidth = 1
)
)
push!(group_labels, names[idx])
scatter!(
ax, [results_time_norm[idx]], [results_mem_norm[idx]],
color = (group_colors[g], 0.7),
marker = marker_shape,
markersize = 25,
strokewidth = 1,
strokecolor = :black
)
end
push!(legend_elements, group_elements)
push!(legend_labels, group_labels)
push!(legend_titles, string(g))
endAdd Legend outside the plot
Legend(f2[1, 2], legend_elements, legend_labels, legend_titles, framevisible = false)
# Highlight the "Utopia Point" (Theoretical Best)
scatter!(
ax, [1.0], [1.0],
marker = :star5,
markersize = 20,
color = (:red, 0.7),
label = "Ideal Limit"
)
text!(
ax, 1.0, 1.0, text = "Utopia Point", align = (:right, :top),
offset = (55, -5), color = :red, fontsize = 15
)
# Add "Iso-Efficiency" curves (Optional visual aid)
# Curves where Time * Memory = Constant (Cost invariant)
x_range = range(
minimum(results_time_norm) * 0.8, stop = maximum(results_time_norm) * 1.1, length = 100
)
lines!(ax, x_range, 5.0 ./ x_range, color = (:gray, 1.0), linestyle = :dot)
text!(
ax, maximum(x_range), 5.0 / maximum(x_range),
text = "Iso-cost", fontsize = 20, color = :black
)
xlims!(ax, minimum(results_time_norm) * 0.5, maximum(results_time_norm) * 1.5)
ylims!(ax, minimum(results_mem_norm) * 0.5, maximum(results_mem_norm) * 1.5)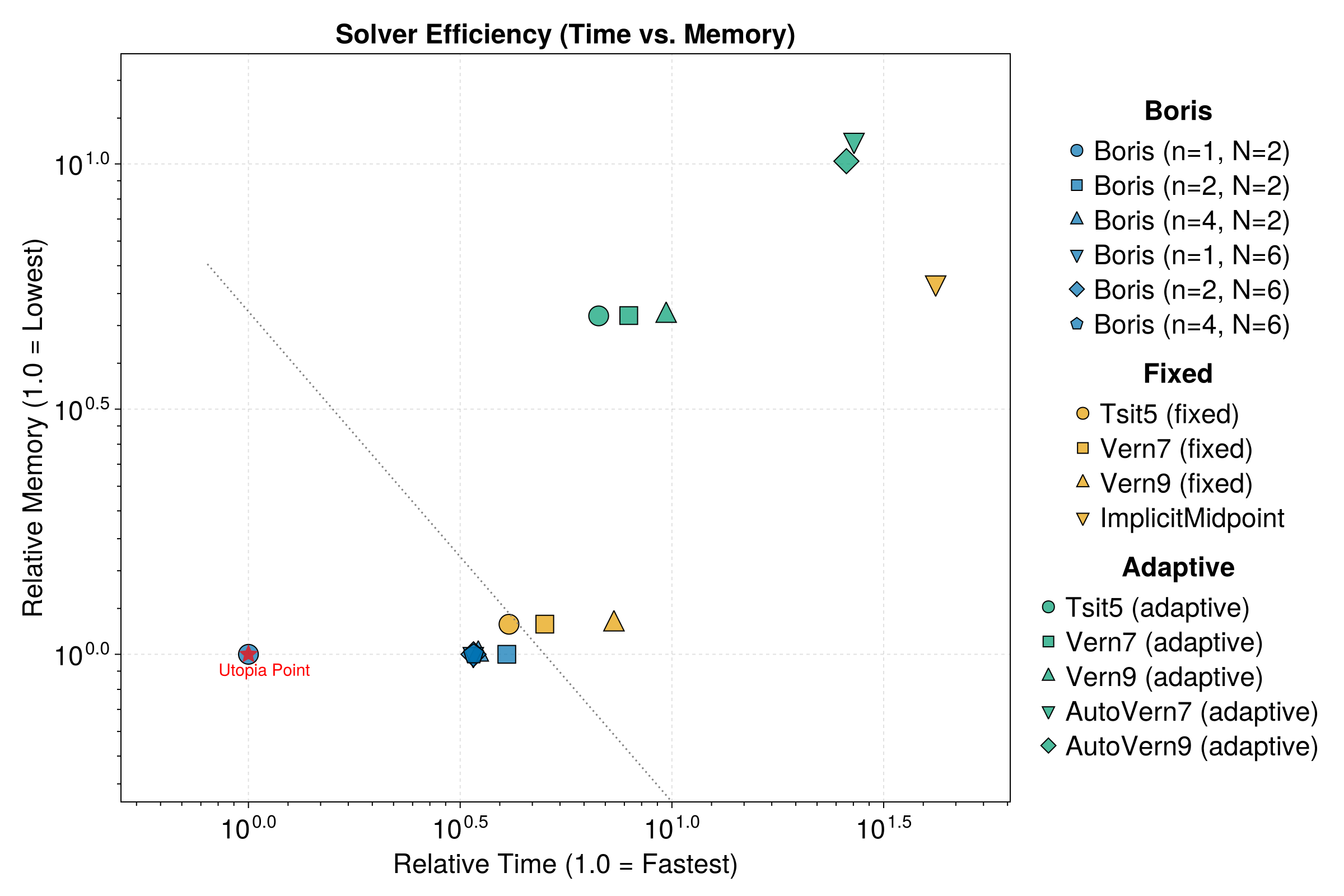
In practice, it is pretty hard to find an optimal algorithm. The native Boris method is good if you want a fixed time step. When calling OrdinaryDiffEq.jl, we recommend using Vern9() as a starting point instead of Tsit5(), especially combined with adaptive timestepping. Further fine-grained control includes setting dtmax, reltol, and abstol in the solve method. Note: Geometric integrators from GeometricIntegratorsDiffEq were previously included but removed due to poor performance and compatibility issues compared to the optimized SciML solvers.