Shock Phase Space
This example demonstrates how to trace ions across a collisionless shock and analyze their phase space distribution, inspired by the demo from IRF-matlab. We utilize Liouville's theorem (phase space density conservation), backward/forward tracing, and flux injection to reconstruct the distribution function.
using TestParticle
import TestParticle as TP
using StaticArrays
using Random
using FHist
using VelocityDistributionFunctions
using CairoMakie
using Meshes
seed = 42;Upstream Plasma Parameters
const T_ion = 20.0 # ion temperature [eV]
const vth_ion = sqrt(2 * TP.qᵢ * T_ion / TP.mᵢ) # ion thermal speed [m/s]
const V_sw = -400.0e3 # solar wind bulk speed [m/s]
const P_sw = 0.08e-9; # solar wind dynamic pressure [Pa]Shock Structure Parameters
const n_up = 3.0e6 # upstream number density [m⁻³]
const n_down = 8.0e6 # downstream number density [m⁻³]
const shock_width = 5.0e3; # shock ramp width [m]Magnetic Field Parameters
const θ_Bn = 45.0 # shock normal angle [degree]
const B_mag = 30.0e-9 # upstream magnetic field magnitude [T]
function compute_tanh_profile_coefficients(θ_Bn, B_mag)
B_up_y, B_up_x = B_mag .* sincosd(θ_Bn)
B_up_mag = B_mag
B_down_x = B_up_x
B_down_y = 3 * B_up_y
B_down_mag = sqrt(B_down_x^2 + B_down_y^2)
B_jump = 0.5 * (B_down_mag - B_up_mag)
B_avg = 0.5 * (B_up_mag + B_down_mag)
return B_jump, B_avg
end
const B_jump, B_avg = compute_tanh_profile_coefficients(θ_Bn, B_mag)
const B_normal = 5.0e-9; # shock normal component of B [T]Field Definitions
We define custom analytical functions for the electric and magnetic fields across the shock transition layer.
function get_B_shock(r)
x = r[1]
bx = B_normal
by = -B_jump * tanh(x / shock_width) + B_avg
bz = 0.0
return SVector{3}(bx, by, bz)
end
"""
Electric field from generalized Ohm's law (Hall term + electron pressure).
"""
function get_E_shock(r)
xnorm = r[1] / shock_width
tanh_v = tanh(xnorm)
sech_v = sech(xnorm)
ni = -n_up * tanh_v + n_down
jz = -B_jump * sech_v^2 / (TP.μ₀ * shock_width) # Ampere's law
by = -B_jump * tanh_v + B_avg
eni = TP.qᵢ * ni
ex = -jz * by / eni + P_sw * sech_v^2 / (eni * shock_width)
ey = jz * B_normal / eni
ez = -V_sw * (B_avg - B_jump)
return SVector{3}(ex, ey, ez)
end;Simulation Setup
nparticles = 10000
const x_source = SA[300.0e3, 0.0, 0.0] # source plane location [m]
const tspan = (0.0, 20.0) # simulation time span [s]
const dt = get_gyroperiod(3 * B_mag) / 20 # time step [s]
param = prepare(get_E_shock, get_B_shock; species = Proton)
# Source velocity distribution (isotropic Maxwellian)
const p_thermal = n_up * TP.qᵢ * T_ion
const vdf = TP.Maxwellian(SA[V_sw, 0.0, 0.0], p_thermal, n_up; m = TP.mᵢ)
function prob_func_maxwellian(prob, ctx)
v = rand(ctx.rng, vdf)
u0 = SA[x_source..., v...]
return remake(prob, u0 = u0)
end
u0_dummy = SA[0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
prob = TraceProblem(u0_dummy, tspan, param; prob_func = prob_func_maxwellian)
println("Starting simulation with $nparticles particles...")
t_mc = @elapsed sols = TP.solve(
prob, Boris(); dt, savestepinterval = 10, trajectories = nparticles, seed
);
println("Simulation complete. Flux injection tracing time: $(round(t_mc; digits = 2)) s")
# Detector planes (upstream and downstream of the shock)
const x_upstream = 2.0e5 # [m]
const x_downstream = -2.0e5 # [m]
detector_up = Meshes.Plane(
Meshes.Point(x_upstream, 0.0, 0.0), Meshes.Vec(1.0, 0.0, 0.0)
)
detector_down = Meshes.Plane(
Meshes.Point(x_downstream, 0.0, 0.0), Meshes.Vec(1.0, 0.0, 0.0)
);Starting simulation with 10000 particles...
Simulation complete. Flux injection tracing time: 0.73 sTo get the velocity space distributions, we bin the crossing events into 2D orthogonal velocity planes, integrating over the third dimension.
Method 1: Forward Monte-Carlo Injection
Simulated particles are treated as macro-particles launched in a steady-state flux at the source. Crossing events are converted to phase-space density via kinematic weighting (see below).
function reconstruct_flux_projections(sols, detector, n0, dv_km)
# Initial velocities at the source plane
vxi = [s.u[1][4] for s in sols.u] # initial vx [m/s]
# Detect crossings at the plane
vs, ws_init = get_particle_crossings(sols, detector, vxi)
v_edges = -1000:dv_km:1000
h_3d = Hist3D(; binedges = (v_edges, v_edges, v_edges))
# Flux normalization factor S = n0_km3 / (N_total * dv_km^2)
# Conversion: n0 [m^-3] * 1e9 = n0 [km^-3]
S = (n0 * 1.0e9) / (length(sols.u) * dv_km^2)
for (v, vxi_val) in zip(vs, ws_init)
# Weight w = (v_xi / v_det) * S
w = abs(vxi_val) / abs(v[1]) * S
push!(h_3d, v[1] * 1.0e-3, v[2] * 1.0e-3, v[3] * 1.0e-3, w) # units: [s^2/km^5]
end
return project(h_3d, :z), project(h_3d, :y), project(h_3d, :x)
end
function plot_shock_vdf(hists_up, hists_down, x_up, x_down; vlim = 1000.0)
fig = Figure(size = (1200, 600), fontsize = 20)
xlabels = [L"V_x [\mathrm{km/s}]", L"V_x [\mathrm{km/s}]", L"V_y [\mathrm{km/s}]"]
ylabels = [L"V_y [\mathrm{km/s}]", L"V_z [\mathrm{km/s}]", L"V_z [\mathrm{km/s}]"]
for i in 1:3
# Upstream (row 1) and Downstream (row 2)
for (row, hists, label, xloc) in
[(1, hists_up, "Upstream", x_up), (2, hists_down, "Downstream", x_down)]
ax = Axis(
fig[row, i], title = "$(label) x = $(xloc * 1.0e-3) km",
xlabel = xlabels[i], ylabel = ylabels[i];
limits = (-vlim, vlim, -vlim, vlim)
)
h = hists[i]
hm = h isa Tuple ? heatmap!(ax, h...; colormap = :turbo) :
heatmap!(ax, h; colormap = :turbo)
if i == 3
Colorbar(fig[row, 4], hm; label = L"[\mathrm{s}^2/\mathrm{km}^5]")
end
end
end
return fig
end
hists_up = reconstruct_flux_projections(sols, detector_up, n_up, 20.0)
hists_down = reconstruct_flux_projections(sols, detector_down, n_up, 20.0)
fig_flux = plot_shock_vdf(hists_up, hists_down, x_upstream, x_downstream)
The kinematic weight
Method 2: Forward Liouville Tracking
Forward Liouville tracking starts from a sphere of initial conditions in velocity space at the source and traces forward to the detector, combining Monte-Carlo sampling of the sphere with Liouville's theorem.
function reconstruct_liouville_projections(sols, detector, vdf, n0, Vsphere; dv_km = 20.0)
# 1. Initial weights from source PDF
ws0 = [n0 * pdf(vdf, s.u[1][SA[4, 5, 6]]) for s in sols.u]
# 2. Crossings
vs, ws = get_particle_crossings(sols, detector, ws0)
v_edges = -1000:dv_km:1000
h_3d = Hist3D(; binedges = (v_edges, v_edges, v_edges))
# Normalization in km-based units: Vsphere [km^3], dv_km [km/s]
# Conversion: 1 m^3 = 1e-9 km^3
Vsphere_km = Vsphere * 1.0e-9
S_L = Vsphere_km / (length(sols.u) * dv_km^2)
for (v, w) in zip(vs, ws)
# w is in [s^3/m^6]. Convert to [s^3/km^6] by multiplying 1e18.
push!(h_3d, v[1] * 1.0e-3, v[2] * 1.0e-3, v[3] * 1.0e-3, w * 1.0e18 * S_L)
end
return project(h_3d, :z), project(h_3d, :y), project(h_3d, :x)
end
nparticles_m2 = 10000
const vradius_m2 = 3 * vth_ion # velocity space radius, [m/s]
const Vsphere_m2 = (4 / 3) * π * vradius_m2^3 # velocity space volume
# Uniform sampling in a 3D sphere
function prob_func_m2(prob, ctx)
r = vradius_m2 * rand(ctx.rng)^(1 / 3)
ϕ = 2π * rand(ctx.rng)
θ = acos(2 * rand(ctx.rng) - 1)
sinθ, cosθ = sincos(θ)
cosϕ, sinϕ = sincos(ϕ)
v = SA[V_sw + r * sinθ * cosϕ, r * sinθ * sinϕ, r * cosθ]
u0 = SA[x_source..., v...]
return remake(prob, u0 = u0)
end
prob_m2 = TraceProblem(
SA[0.0, 0.0, 0.0, 0.0, 0.0, 0.0], tspan, param; prob_func = prob_func_m2
)
t_liou = @elapsed sols_m2 = TP.solve(
prob_m2, Boris(); dt, savestepinterval = 10, trajectories = nparticles_m2, seed
);
hists_up_m2 = reconstruct_liouville_projections(
sols_m2, detector_up, vdf, n_up, Vsphere_m2
)
hists_down_m2 = reconstruct_liouville_projections(
sols_m2, detector_down, vdf, n_up, Vsphere_m2
)
fig_forward = plot_shock_vdf(hists_up_m2, hists_down_m2, x_upstream, x_downstream)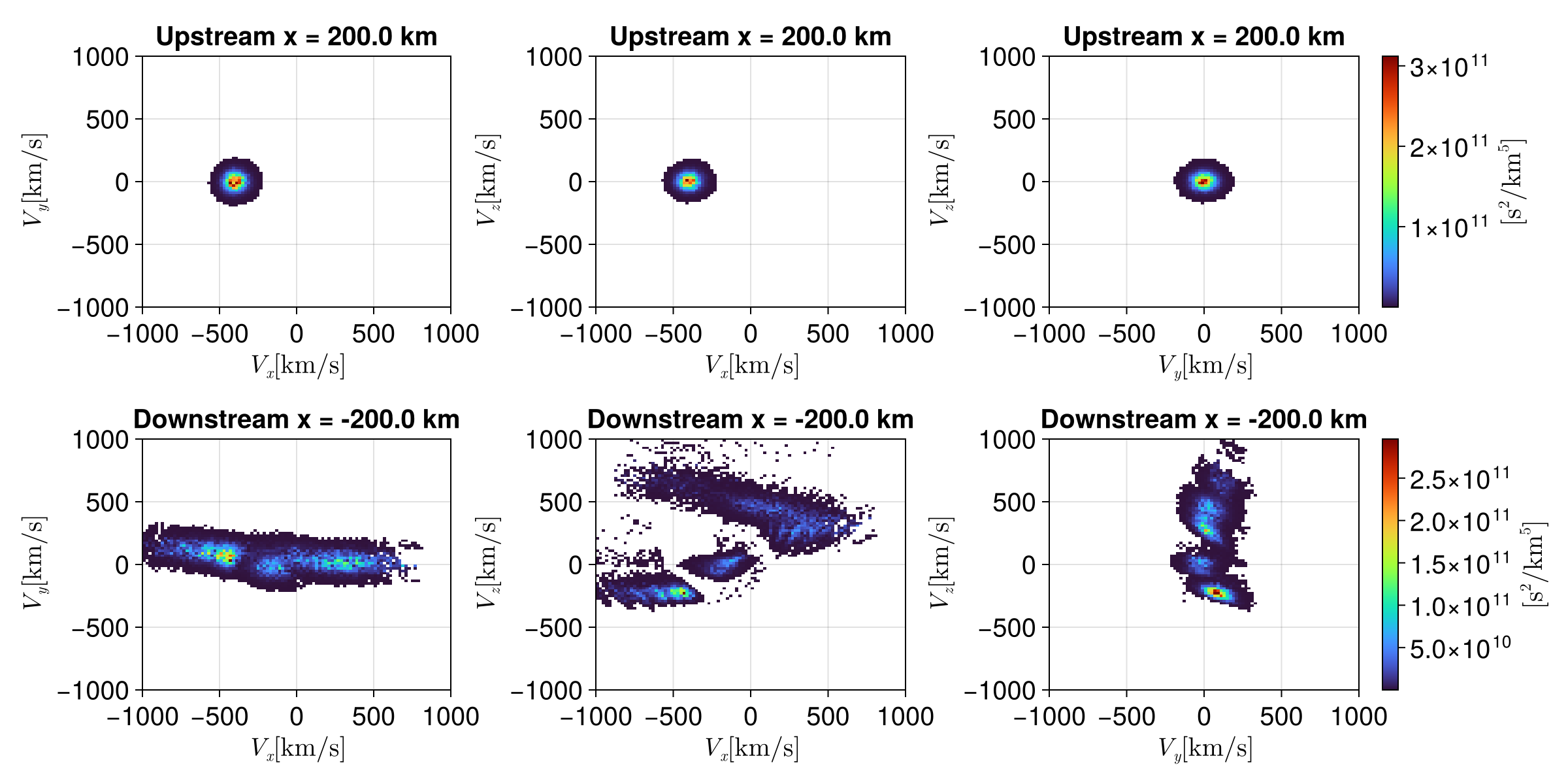
Method 3: Backward Tracing
Starting from a velocity-space grid at the detector, particles are traced backward; the phase-space density at the detector equals the source density evaluated at the traced initial state. Integrating the 3D values gives the projections compared against the other methods below.
The grid uses dv_km = 20 km/s, with vy_range = ±400 km/s to cover the band around V_sw = -400 km/s and vx/vz = ±1000 km/s to capture the reflected beam at positive velocities. Since the populated region is a small fraction of the box, adaptive = true first traces a coarse grid (dv_coarse_km = 60 km/s) to locate the active cells, then a fine grid only inside that box (padded by margin_km). Discarded cells lie below the f_max·10⁻⁶ clipping threshold, so the projections are unchanged while the trajectory count drops by ≈2–3×.
# Solve one backward-tracing pass over a uniform velocity grid and return the 3D phase-space
# density sampled at the source plane, in [s³/km⁶].
function run_backward_pass(vx_grid, vy_grid, vz_grid, detector_x, vdf, n0, dt, param)
nx, ny, nz = length(vx_grid), length(vy_grid), length(vz_grid)
ntraj = nx * ny * nz
function prob_func(prob, ctx)
iz = (ctx.sim_id - 1) % nz + 1
iy = ((ctx.sim_id - 1) ÷ nz) % ny + 1
ix = ((ctx.sim_id - 1) ÷ (nz * ny)) % nx + 1
u0 = SA[detector_x, 0.0, 0.0, vx_grid[ix], vy_grid[iy], vz_grid[iz]]
return remake(prob, u0 = u0)
end
source_plane = Meshes.Plane(Meshes.Point(x_source...), Meshes.Vec(1.0, 0.0, 0.0))
prob = TraceProblem(
SA[0.0, 0.0, 0.0, 0.0, 0.0, 0.0], (0.0, -20.0), param;
prob_func = prob_func
)
sols = TP.solve(
prob, Boris(), EnsembleThreads(); dt = -dt, trajectories = ntraj,
savestepinterval = 10, isoutside = (u, p, t) -> u[1] > x_source[1] + 50.0e3
)
f_3d = zeros(nx, ny, nz)
for (i, sol) in enumerate(sols.u)
st = get_first_crossing(sol, source_plane)
if !any(isnan, st)
iz = (i - 1) % nz + 1
iy = ((i - 1) ÷ nz) % ny + 1
ix = ((i - 1) ÷ (nz * ny)) % nx + 1
f_3d[ix, iy, iz] = n0 * pdf(vdf, st[SA[4, 5, 6]]) * 1.0e18
end
end
return f_3d
end
function reconstruct_backward_projections(
detector_x, vdf, n0, dt, param;
v_range = 1000.0e3, vy_range = 400.0e3, dv_km = 20.0,
adaptive = true, dv_coarse_km = 60.0, margin_km = 150.0
)
dv = dv_km * 1.0e3
if adaptive
# Pass 1 (coarse): locate the populated region cheaply.
vx_c = range(-v_range, v_range, step = dv_coarse_km * 1.0e3)
vy_c = range(-vy_range, vy_range, step = dv_coarse_km * 1.0e3)
vz_c = range(-v_range, v_range, step = dv_coarse_km * 1.0e3)
else
# Uniform grid over the full box (baseline / no adaptation).
vx_c = range(-v_range, v_range, step = dv)
vy_c = range(-vy_range, vy_range, step = dv)
vz_c = range(-v_range, v_range, step = dv)
end
t_solve = @elapsed begin
f_coarse = run_backward_pass(vx_c, vy_c, vz_c, detector_x, vdf, n0, dt, param)
if adaptive
# Keep every cell well above the display threshold, padded by `margin_km`.
kept = findall(f_coarse .> maximum(f_coarse) * 1.0e-5)
if isempty(kept)
vx_grid, vy_grid, vz_grid = vx_c, vy_c, vz_c
f_3d_km = f_coarse
else
ixs, iys, izs = getindex.(kept, 1), getindex.(kept, 2), getindex.(kept, 3)
vx_grid = range(
max(-v_range, floor((vx_c[minimum(ixs)] - margin_km * 1.0e3) / dv) * dv),
min(v_range, ceil((vx_c[maximum(ixs)] + margin_km * 1.0e3) / dv) * dv);
step = dv
)
vy_grid = range(
max(-vy_range, floor((vy_c[minimum(iys)] - margin_km * 1.0e3) / dv) * dv),
min(vy_range, ceil((vy_c[maximum(iys)] + margin_km * 1.0e3) / dv) * dv);
step = dv
)
vz_grid = range(
max(-v_range, floor((vz_c[minimum(izs)] - margin_km * 1.0e3) / dv) * dv),
min(v_range, ceil((vz_c[maximum(izs)] + margin_km * 1.0e3) / dv) * dv);
step = dv
)
f_3d_km = run_backward_pass(vx_grid, vy_grid, vz_grid, detector_x, vdf, n0, dt, param)
end
else
vx_grid, vy_grid, vz_grid = vx_c, vy_c, vz_c
f_3d_km = f_coarse
end
end
nparticles_bw = length(vx_grid) * length(vy_grid) * length(vz_grid)
# Integral over third dimension [km/s]: f_int in [s²/km⁵]
f_xy = dropdims(sum(f_3d_km, dims = 3), dims = 3) .* (step(vz_grid) * 1.0e-3)
f_xz = dropdims(sum(f_3d_km, dims = 2), dims = 2) .* (step(vy_grid) * 1.0e-3)
f_yz = dropdims(sum(f_3d_km, dims = 1), dims = 1) .* (step(vx_grid) * 1.0e-3)
for f in (f_xy, f_xz, f_yz)
f_max = maximum(f)
for i in eachindex(f)
if f[i] < f_max * 1.0e-6
f[i] = NaN
end
end
end
return (
(vx_grid .* 1.0e-3, vy_grid .* 1.0e-3, f_xy),
(vx_grid .* 1.0e-3, vz_grid .* 1.0e-3, f_xz),
(vy_grid .* 1.0e-3, vz_grid .* 1.0e-3, f_yz),
), t_solve, nparticles_bw
end
res_up_bw, t_bw_up, n_bw_up =
reconstruct_backward_projections(x_upstream, vdf, n_up, dt, param)
res_down_bw, t_bw_down, n_bw_down =
reconstruct_backward_projections(x_downstream, vdf, n_up, dt, param)
t_bw = t_bw_up + t_bw_down
n_bw = n_bw_up + n_bw_down
fig_backward = plot_shock_vdf(res_up_bw, res_down_bw, x_upstream, x_downstream)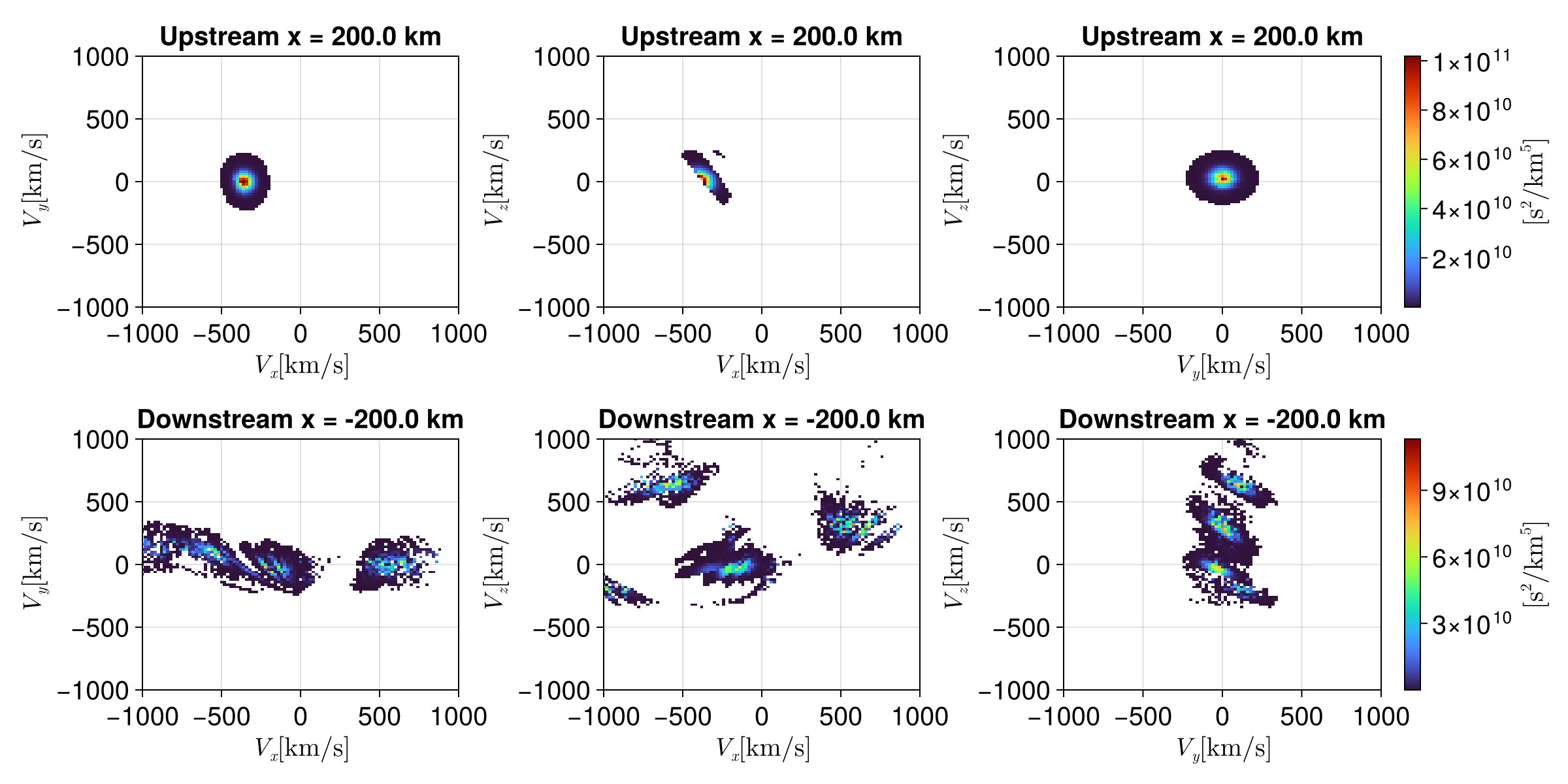
Tracing Time Comparison
Monte-Carlo and forward-Liouville each launch 10⁴ macro-particles; backward Liouville places a regular velocity grid at the detector. With dv_km = 20 km/s and the vy shrink (±400 instead of ±1000 km/s), the adaptive two-pass focuses the fine grid on the populated region — about 3×10⁵ trajectories total (≈3×10⁴ upstream, ≈3×10⁵ downstream). The total cost is then comparable to the forward methods. Per trajectory, backward tracing is the cheapest: it terminates at the source plane and needs no statistical weighting.
t_per_mc = t_mc / nparticles * 1.0e6
t_per_liou = t_liou / nparticles_m2 * 1.0e6
t_per_bw = t_bw / n_bw * 1.0e6;Summary
This example illustrates three complementary ways to reconstruct the phase space density from particle simulations.
| Method | Flux Injection | Forward Liouville Tracking | Backward Liouville Tracing |
|---|---|---|---|
| Noise | Statistical (∝ 1/√N) | Low (analytical weights) | None (grid-based) |
| Coverage | Source-sampled | Source-sampled | Target-sampled |
| Tail resolution | Poor without large N | Limited by sphere radius | Uniform across grid |
| Post-processing | Binning + weighting | Binning + projection | PDF evaluation only |
| Cost | 0.7 s (73.2 µs/traj, 10000 traj.) | 0.7 s (66.5 µs/traj, 10000 traj.) | 4.7 s (15.3 µs/traj, 305281 traj.) |